自然让我们产生无穷的遐想,给我们巨大的、深邃的思想启示。
撰文 | 戴振东(南京航空航天大学教授)
各位观众大家好,我是戴振东,来自南京航空航天大学。我的专业是仿生学,就是把生物学和工程技术结合起来的学科。今天我给大家带来的是《从壁虎到爬壁机器人》。
壁虎在我们的日常生活中随处可见,在家里、洞穴里边都能看到,是一个很好的仿生对象。但到了真正要做实验的时候,我们发现很难抓到壁虎。
于是我们就在《扬子晚报》上登报征集,谁家有壁虎可以贡献出来,我们做完实验以后会把它们放生。

我们在南京找到了多疣壁虎,但是发现这种壁虎依然比较小。幸运的是,在我们国家的广西、云南有大壁虎分布和饲养。

这就是大壁虎的生存环境。

为了养好壁虎,我们模仿这样的环境,建造了天然的实验系统。

这是我们饲养的壁虎,图里的这只壁虎刚刚从右下角的那个蛋里孵化出来。它做的第一件事情,就是把自己的爪子洗得干干净净。

这是它长大以后这样的样子。饲养壁虎的过程也不容易,壁虎也会生病。有一次它得了口角炎,但我们没有对应的兽医,只好请我的夫人来给壁虎看病,她是皮肤病研究所的医生。
“毛茸茸”的脚抓得牢
我们都知道结构决定功能,那么壁虎脚上的结构到底是什么样子?
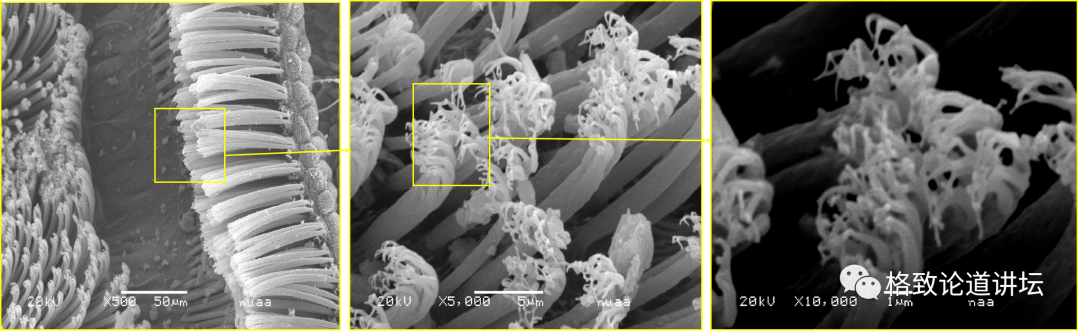
这就是南京的多疣壁虎的脚,它脚上的刚毛从500倍、5000倍到1万倍逐步地放大。结构上是一根刚毛在末端分成了好多小的铲状绒毛分支,而每一个小末端都小到了我们头发丝的千分之一到百分之几。
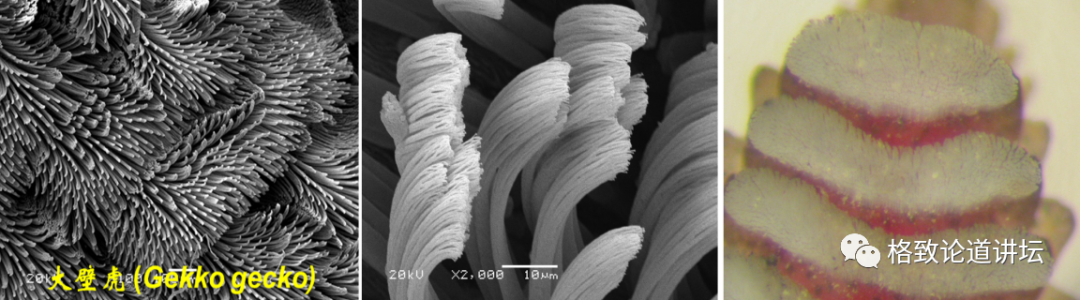
这是大壁虎脚上长的刚毛,中间这张实际是放大2000倍的样子,结构也是非常小。
我们进一步看一下壁虎脚上的毛在脚趾头上是怎么长的。这是我们用X射线衍射(X-ray Diffraction,XRD)做的效果,模拟了壁虎脚趾上面叫做皮瓣的细长结构。皮瓣上白白的就是它的毛。壁虎正是靠着这样一些毛茸茸的东西,使自己能够吸附在各种各样的表面上。
视频演示了壁虎爪子的4个指头是怎么样抓上光滑的玻璃的。人的手指做不到外翻,但壁虎的手指会先外翻,然后把5个指头内收,从而牢牢地抓到天花板上。壁虎想要脱附的时候会外翻手指,想要黏附的时候就内收。
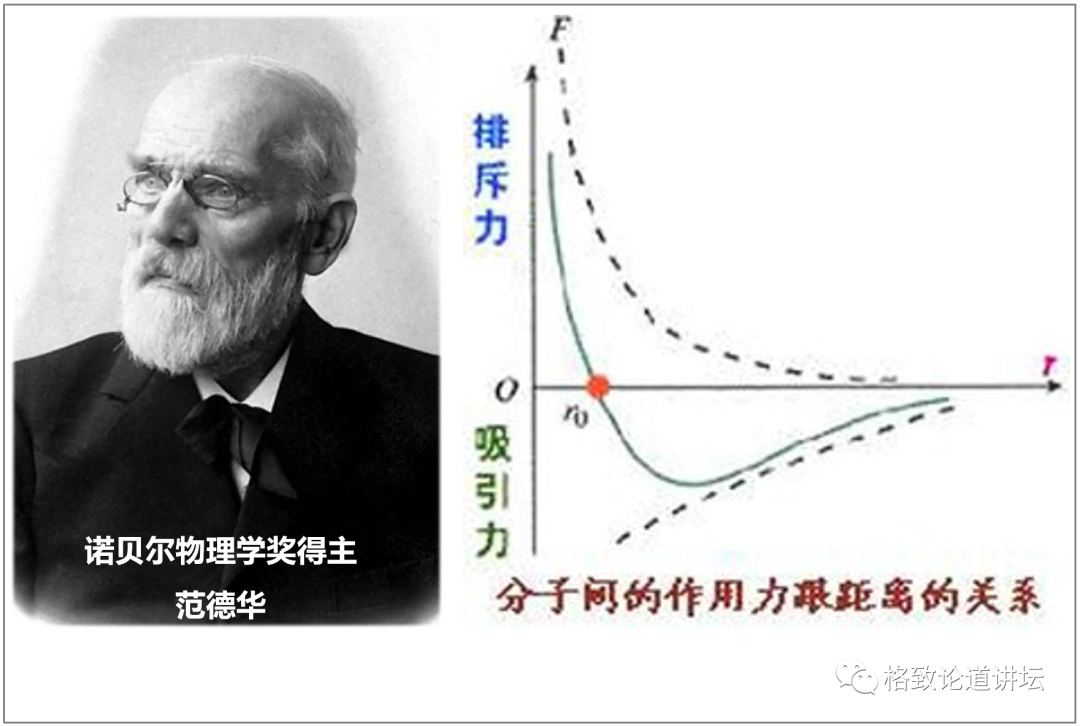
那这个黏附过程是依靠什么样的力学机制呢?在这里,我们必须提到一个叫范德华的诺贝尔奖获得者。范德华先生在研究液体凝固的过程中发现了范德华力。
范德华力的细节比较复杂,简单地说就是,分子离得非常近的时候,物体间就会产生一种排斥力。分子之间离得很近的时候产生的是排斥力,而且排斥力随距离接近增加得非常快;但是离得相对比较远的时候,反而会产生一个吸引力。
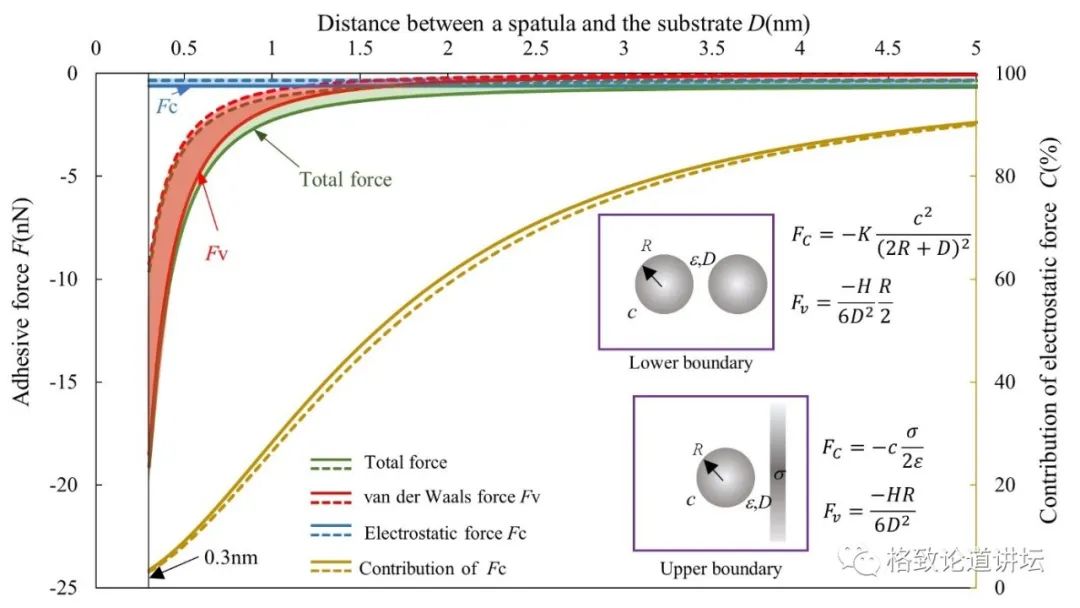
这张图体现了范德华力和静电力是怎么相互作用的。当两个分子表面的距离非常小,小到我们头发丝的万分之一,也就是大概一个纳米的时候,形成的范德华力要比静电力要大很多。
有了范德华力作为理论基础,我们接下来要做的就是做出像壁虎一样很细很细的毛。
制造仿壁虎黏附材料
我们有2个技术路径,其中一个就是用碳纳米管制作,可以用垂直径向生长的碳纳米管来实现这样的功能。但是不幸的是,目前这项技术还难以实现产业化应用。
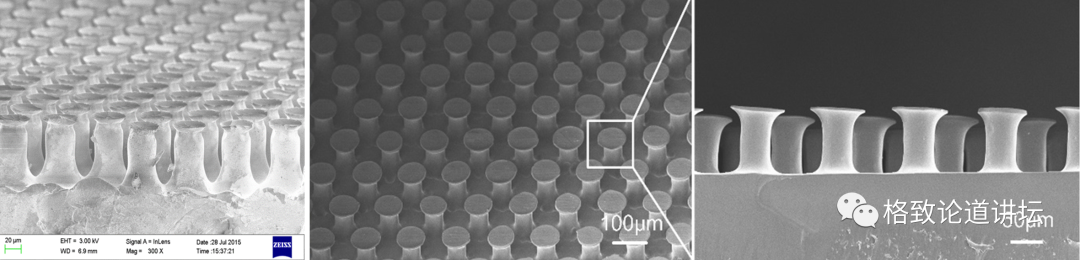
左:德国公司的仿生黏附材料;中、右:在南京市溧水区支持下研制的黏附材料
左边这个图,就是由我在德国时的合作导师担任技术指导的公司做出的仿壁虎黏附材料,中图和右图是我们团队在南京市溧水区的支持下研制的仿生黏附材料。大家看到的这个已经放大了很多倍。
我给大家简单地讲一下制作方法。我们使用的模具是金属的,需要在1平方厘米以内打6万个到20万个孔,然后把高分子材料注进去,而且还要给每一个孔里边修出一个喇叭口来。
有了这样的结构,就可以来看它如何应用。
仿壁虎黏附材料可以应用于航天员训练。在轨失重条件下,航天员们存在骨流失等问题,需要进行一定的锻炼。
另外,航天员们在太空中时还做着各种各样的工作,也都需要锻炼。伸肌的锻炼比较好做,屈肌的锻炼以前一直没有办法做。
我们在地球上抬腿的时候,因为有重力,所以抬腿时需要用力,这样就能使肌肉得到锻炼。但是在微重力环境下,抬腿不需要使太大的力气,就没有办法锻炼。

全球首个实现失重环境下屈肌锻炼的装置:仿生黏附鞋
于是我们研制了仿生黏附鞋。航天员穿上这个鞋子,抬腿的时候就会对肌肉产生刺激,能够得到很好的锻炼效果,这样就可以做屈肌训练了。
合作研发用于失重条件下的黏附材料
那么仿壁虎黏附材料在微重力环境下还有没有其他应用呢?这是我们和北京紫微公司合作,用失重飞机做的模拟。我们在10秒钟完全无重力的情况下,做了一个黏附实验。实验证明在完全失重情况下,仿壁虎黏附材料可以产生非常好的黏附力。
这是另一个实验。我们用气浮台把两个200多公斤的东西浮起来,以此模拟微重力的环境,通常情况下这两个东西碰撞接触后会分开,但是用了仿生黏附材料的物体后,它们在相撞之后结合成了一体,还可以被拉着跑。
这样的黏附材料就可以用于太空。如果轨道上有一个空间碎片,就可以用黏附材料把它抓住,让碎片脱离轨道。甚至可以把这个碎片“废物利用”,作为空间制造的材料。
适应各种环境的仿壁虎机器人
那是不是有了仿壁虎材料,壁虎机器人就可以被很轻易地制造出来了?实际上,仿壁虎机器人比我们想象的要复杂不少。
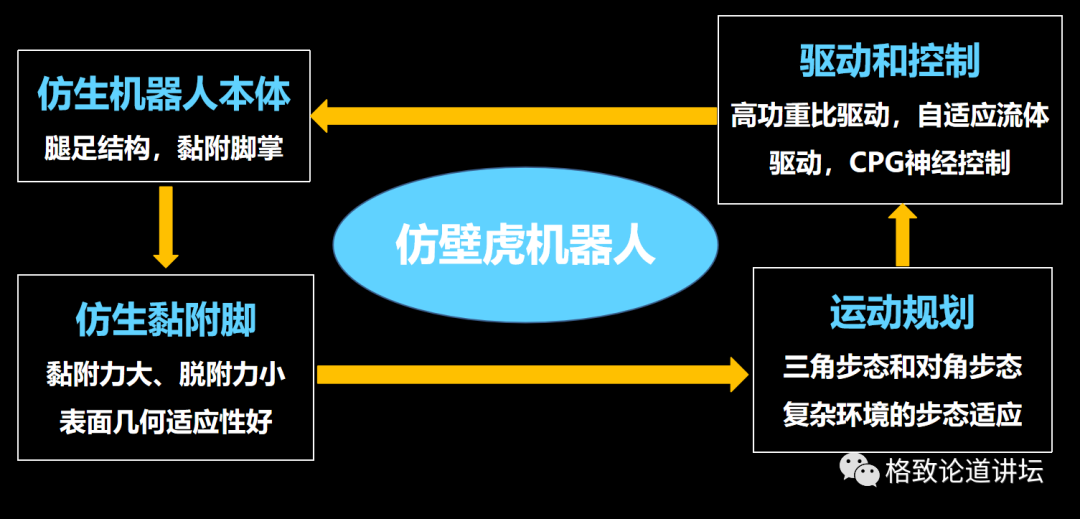
仿壁虎机器人涉及到好几个方面的问题。机器人的各个机构就像我们人的关节,我们要考虑它是一个什么样的结构。最重要的是,我们要考虑如何制造仿壁虎机器人的脚。
然后就是考虑机器人要怎么运动。因为它是一个四足的腿式机器人,运动时有多重步态,包括三角步态和对角步态等等。三角步态就是三个脚落在地上,一个脚走;对脚步态就是两个脚在支撑状态,另外两个在走。我们需要调和它在复杂环境下的步态。
除此之外,还涉及到驱动和控制,包括过驱动的问题。这四个部分的研究总体上是一个螺旋式上升的问题。
为了解决这个问题,我们要学习和研究壁虎到底是怎么运动的。这三个图分别是壁虎在天花板、墙及地面上跑步时的行为学。
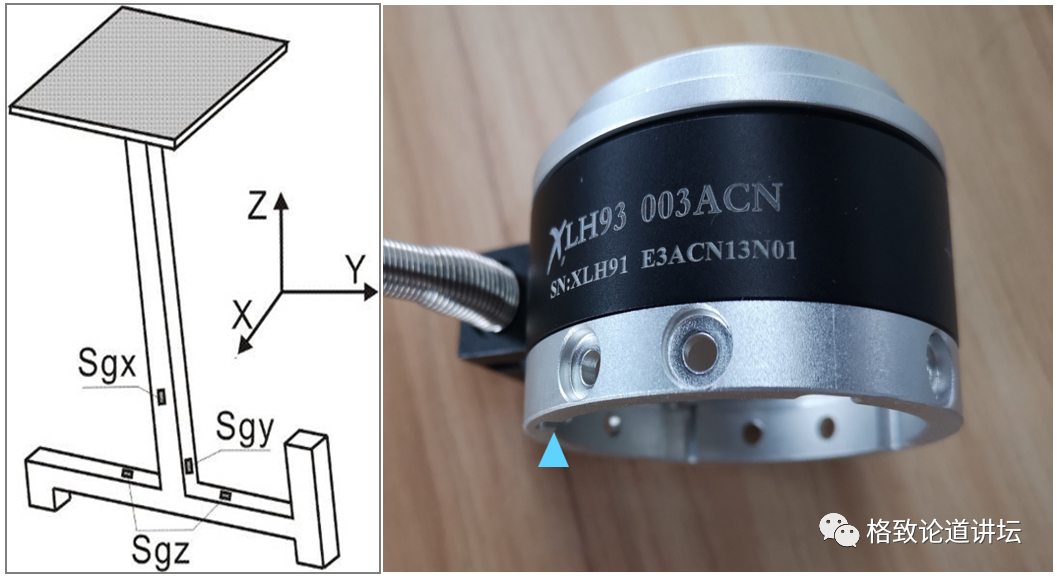
这是我们为了研究壁虎怎么运动研制的全球首台多维力传感器。我们后来已经把这个多维力传感器做成了一个产品,
知道了壁虎在各种情况下怎么受力,我们在做机器人的时候就可以用同样的规律来控制。
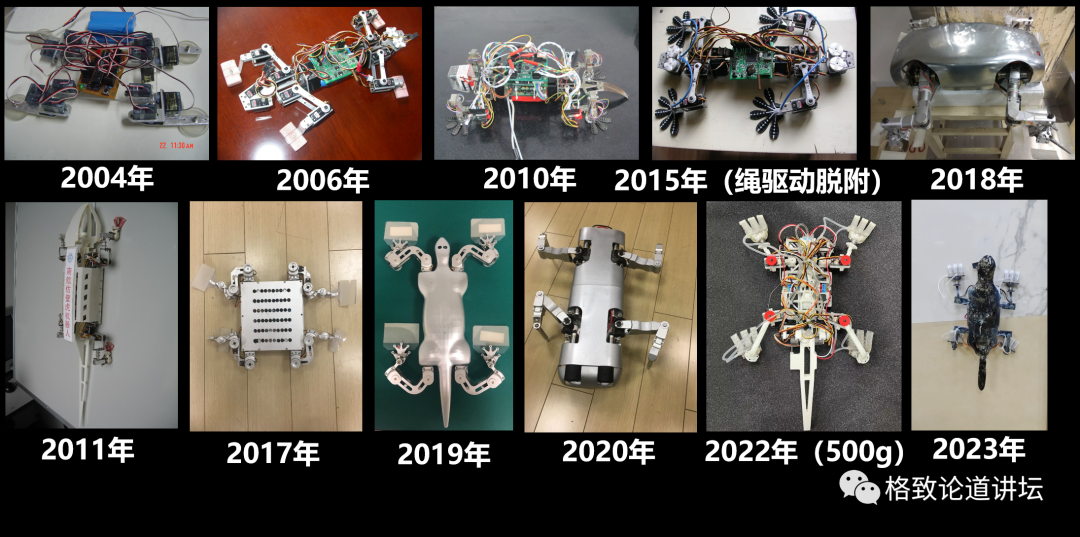
经过20多年的研究,我们团队做出了一系列的壁虎机器人,2004年的这个机器人长得又丑,跑得又慢,到30°的倾面上就会滑下来。而2023年做的这个壁虎机器人无论在粗糙或光滑的表面都可以运动,可以在墙上运动,甚至还可以在天花板上运动。
这是我们的几款仿壁虎机器人。最左边的机器人正在一个垂直的玻璃表面爬行,而且这个时候机器人只有一个爪黏附着。中间的机器人有4个爪,黏附在一个模拟空间站的表面。最右边这个机器人在凹形的表面黏附着。如果是在一个凸形表面运动,它可以通过使劲增加一点法向力,让自己运行起来更加的方便。但是如果是凹形表面的运动会更加困难。经过几年的研究,我们也让机器人实现了在凹形表面黏附的功能。
左:仿壁虎机器人墙面运动;中:实现光滑面快速黏附攀爬;右:实现不同粗糙面上运动
这分别是仿壁虎机器人在垂直的墙面、光滑面和不同粗糙面上的快速运动。最右边这个图中的不同的颜色表明这两个表面的粗糙度是不一样的。
为了让仿壁虎机器人能在全空间运动,像壁虎一样能够在各种表面之间过渡,我们做了大量的模拟和分析。
左:墙角过渡仿真;右:天花板上黏附爬行
左边是壁虎怎么样从地面上爬到墙上的仿真图。我们先观察了壁虎是怎么做的,然后仿照壁虎,规划机器人应该怎么做。右边是仿壁虎机器人在模拟天花板上的攀爬。
我们想看这个技术能不能解决我们工业和日常生活中面临的问题,比如柔性搬运上面。这个仿生柔性机械臂可以搬像圣女果一样很小的东西,还可以搬运鸡蛋这样比较脆弱的东西。生鸡蛋很容易碎,但是在抓取时不需要力控,抓到就能走。因为仿生柔性爪本身的法向力很小,接触很温柔,就可以轻易地把它抓走。同时,各种各样的水果,重的、轻的,包括软的东西,都可以被抓起来。
这是我们最近研制的仿壁虎机器人,它的爪子可以做到主动黏附和主动脱附,这样会使它的工作更加可靠。
这个也是我们做的一个仿壁虎机器人,它正在一个模拟空间站表面的装置上面横着爬,未来可以用于空间站检测。
仿生术的更多应用
那么,未来仿壁虎机器人还可以做些什么?

仿生黏附捕获装置变废为宝
这是一张空间碎片绕地球的分布图。现在我们有数亿个一厘米以上的碎片在绕着我们的地球运行,已经有若干个卫星被碎片撞击,我们的中国空间站也曾受到过碎片的干扰。那么能不能把碎片变成一个资源,用我们发明的这样一个技术把它抓起来变废为宝呢?
除了解决太空碎片问题以外,空间站在远端的一些设备和部件,很难被机械臂够到,航天员也很难去对它进行检测,或者对一些运动部件加注油。我们研发的这些技术可能也会对空间站设备检测和部件维护起到一些积极作用。

人类从大自然得到的启发不仅仅来源于壁虎,日常生活里实际上还有很多例子。比如在荷花盛开的时候,我们总看到清清爽爽的荷叶。基于荷叶效应,人们研发了自清洁涂料,涂上自清洁涂料以后,一阵雨过,马上就会干干净净。
同时我们注意到了鸟的飞行,于是发明了飞机。现在我们研发的飞机可以飞得比任何一只鸟都更远、更快、更高。目前我们的飞机还没有做到像鸟儿一样安全,这个是未来会实现的一个梦。
最右边很漂亮的这张图,实际上是个蜻蜓的脑袋。蜻蜓的神经系统相对简单,但是它可以比我们人的双目快10倍发现目标,在飞行的过程中抓住苍蝇把它吃掉。我们从蜻蜓的复眼中得到启发,发明了ATR视觉感应器和复眼相机。
自然让我们产生无穷的遐想,给我们巨大的、深邃的思想启示。希望各位年轻的朋友和老朋友们能够在自然的启发下创造出更多的奇迹。
谢谢大家!
本文经授权转载自微信公众号“格致论道讲坛”。

0
推荐
 京公网安备 11010502034662号
京公网安备 11010502034662号 {kind=link}