撰文 | 邵晓鹏教授(西安电子科技大学)
Polarization,在雷达领域称之为“极化”,在光学领域则被叫做“偏振”。这个自从波动光学建立以来就产生的名词,大家耳熟能详,但真能说出其内涵的人肯定不占多数,尽管在物理课上学习了很多偏振相关的知识。
然而,生活中应用到偏振的地方很多:蜜蜂等昆虫靠偏振进行导航,观看3D电影要戴偏振眼镜,液晶显示屏是基于偏振的,我们戴的墨镜也写着偏振。在成像领域,很多研究人员都在做偏振成像的研究。有时我们惊奇地发现:不是说好的量子吗,怎么变成了偏振?

偏振太阳镜
那么,偏振到底是什么?偏振是不是很重要?我们能用偏振干什么?起步很早的偏振成像遇到了哪些问题?偏振成像的前景怎么样?1
漫长的偏振历史
1669年,丹麦科学家拉斯穆·巴多林第一次通过石英晶体发现了双折射——“线条魔法(纸上一条线,透过石英看到两条线)”;1690年,恵更斯在《光论》里对这一物理现象进行了详细的论述,但无法解释;同时代的牛顿对双折射现象的成因进行了猜测,但以失败而告终,因为牛顿用光的粒子性解释这种现象。1803年托马斯·杨著名的杨氏双缝实验证明了光的波动性,到了1808年,“偏振之父”马吕斯在波动光学的基础上完美地解释了双折射现象,并将这种性质称为“偏振”,证实了偏振是光的一种固有特性,于第二年发表论文提出了著名的马吕斯定律,从此开启了人类认知世界的又一个新维度。
由于偏振是波动光学的特性,需要用波动方程来描述,导致在实际测量、描述、应用计算中过于繁琐,很难用。于是,天才数学家斯托克斯于1852年提出了著名的 Stoke向量来描述偏振光,使得偏振变得简洁明了。你看,用四个参量S0、S1、S2、S3(也常用I、Q、U、V表示)组成4×1的列向量来确定光波的偏振态,比起复杂的波动函数简单多了。我们不禁感叹,数学太重要了!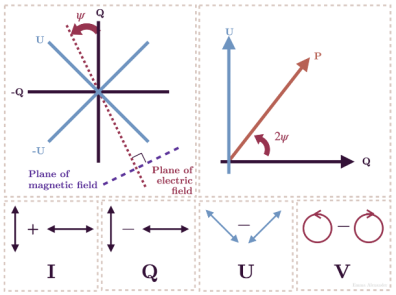 Stokes矢量这才刚刚起步。
Stokes矢量这才刚刚起步。
1892年,庞加莱提出了能够直观描述偏振态的Poincaré球表示法,1941年,琼斯引入Jones向量来描述,但该方法具有一定局限性,其只适用于完全偏振光,若想对于部分偏振光或非偏光进行计算,则需使用穆勒矩阵。Mueller矩阵由美国物理学家穆勒于1943年提出,用于表示斯托克斯矢量之间的变换,矩阵由4×4共16个参量构成。对于一般介质,通常各个穆勒矩阵元都具有特定的物理意义。无论是Stokes向量还是Mueller矩阵,都能够很好地描述偏振特性,在偏振成像中也扮演着重要角色。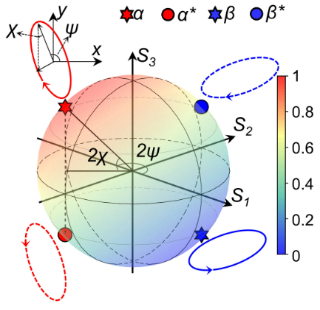 Poincaré球
Poincaré球 硫酸镍晶体生长过程的Mueller矩阵[Gottlieb D, Optics Express, 2021, 29(21)]
硫酸镍晶体生长过程的Mueller矩阵[Gottlieb D, Optics Express, 2021, 29(21)]
以上是对偏振的“古老”回顾,那为何又说偏振很新鲜呢?原以为量子在中国铺天盖地轰轰烈烈地开花结果的我们发现,3D电影、偏振摄影、液晶显示、墨镜……都是偏振的。不是说好的量子吗?怎么看到的大部分都是偏振呢?  偏振3D电影
偏振3D电影
液晶显示
2、“无所不能”的偏振
首先,我们来看看偏振特性。根据偏振方向的不同,可以分为线偏振光、圆偏振光和椭圆偏振光。一般的,光的偏振程度可以根据偏振光强占总光强的比例分为非偏振光、部分偏振光和完全偏振光。偏振度和偏振角则是描述偏振特性的两个重要参量。
 线偏振光
线偏振光
自然光一般认为是非偏振光,但是经过物体表面反射后,在正交方向上会产生强度差异性,从而出现偏振特性。红外偏振特性是由于物体自身发出的红外辐射遵从菲涅尔定律,从而产生偏振特性,这是偏振成像的主要依据。同时,光的偏振与物质特性有关,据此,我们可以利用该特征进行物质分类和识别。正是偏振的这些特点,它可以用在液晶显示、3D电影、导航、材质判别、光通信和量子态的判别等。这里简单介绍一下量子与偏振的关系。量子纠缠是一种纯粹发生于量子系统的现象;在经典力学里,找不到类似的现象。1964年,贝尔提出了这样一个实验:让两个纠缠的光子分别经过两个偏振片,然后在中央汇合,从而可以从宏观上用偏振观测到量子纠缠,这就是量子离不开偏振的原因。 接下来,我们重点讲一讲“无所不能”的偏振成像。一提起偏振成像,大家马上想到的就是去雾、去镜面反射、水下成像和伪装识别等,近几年又兴起了偏振三维成像,偏振成像从地面到太空,从大气到海洋,从工业到医疗,几乎渗透到了每一个行业和领域。但是,当你问起偏振成像的用户体验时,就会有“买家秀”和“卖家秀”的那种味道了,好听一点就是:“有些时候确实能管点用。”这是为什么呢?
接下来,我们重点讲一讲“无所不能”的偏振成像。一提起偏振成像,大家马上想到的就是去雾、去镜面反射、水下成像和伪装识别等,近几年又兴起了偏振三维成像,偏振成像从地面到太空,从大气到海洋,从工业到医疗,几乎渗透到了每一个行业和领域。但是,当你问起偏振成像的用户体验时,就会有“买家秀”和“卖家秀”的那种味道了,好听一点就是:“有些时候确实能管点用。”这是为什么呢?
偏振之所以这么能干是因为它自身的物理属性,物质偏振特性的不同会导致探测信息的差异性,这是其最本质的原因。这听起来很美啊,为什么还会有“买家秀”的吐槽呢?因为偏振虽然是光的一种特性,但这种特性表现得并不明显,我们必须通过一些光学器件才能够观察到它,探测手段也都是间接手段。特别是,偏振是借助于强度探测间接、且偏振特性的差异性太小,偏振片的能量损失也会导致信噪比严重下降。偏振去雾是最早活跃在舞台上的技术,到现在仍然是很有限地应用。为什么偏振能去雾?
这是因为目标信息光与背景散射光存在偏振差异性,如果能比较准确地估算出背景散射光强度的分布,就可以利用偏振差异性实现高清晰透雾霾成像。这本质上是传输介质与目标的偏振特性不同,水下偏振成像同理。听起来很合理,可是为什么偏振去雾没有得到广泛应用呢?甚至很多时候,偏振去雾的结果为什么不如暗通道等信号处理方法呢?水下偏振成像也是喊了很多年,雷声大、雨点小,研究的多、应用的少。 偏振去雾成像[Liu F, Applied Optics, 2015, 51(27)]
偏振去雾成像[Liu F, Applied Optics, 2015, 51(27)] 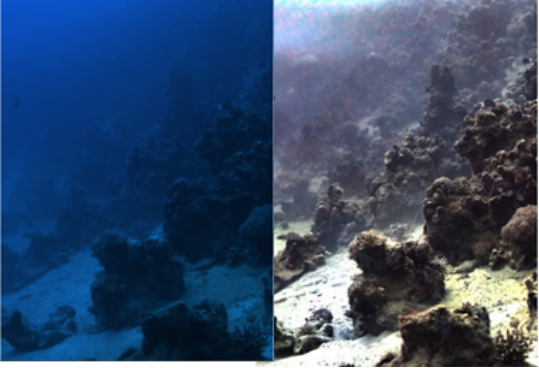 被动偏振水下成像[Liu F, Optics Express, 2019, 27(3)]
被动偏振水下成像[Liu F, Optics Express, 2019, 27(3)] 高浑浊度偏振水下成像[Liu F, Optics Letters, 2018, 43(20)]还有去反射光成像的案例。海面上经常有鱼鳞光反射,湖面反射的太阳光也很强,汽车前挡风玻璃的镜面反射经常导致监控失效,去除这种反射光比较有效的办法是偏振成像,就是利用偏振的共模抑制特性消除反射光。可是,我们做实验的时候,经常发现用偏振难以彻底消除反射光,尤其是汽车的前挡风玻璃,贴了车膜之后,转了半天偏振片,还是看不到车内的情况。
高浑浊度偏振水下成像[Liu F, Optics Letters, 2018, 43(20)]还有去反射光成像的案例。海面上经常有鱼鳞光反射,湖面反射的太阳光也很强,汽车前挡风玻璃的镜面反射经常导致监控失效,去除这种反射光比较有效的办法是偏振成像,就是利用偏振的共模抑制特性消除反射光。可是,我们做实验的时候,经常发现用偏振难以彻底消除反射光,尤其是汽车的前挡风玻璃,贴了车膜之后,转了半天偏振片,还是看不到车内的情况。 利用偏振对抗玻璃反光偏振目标探测同样有问题,它通过求解场景中目标物自身的偏振度和偏振角等偏振特性的真值来判断物体本身的材质和属性等。物理上确实是那么回事,但是真正做实验的时候,恐怕场景复杂时识别率也不会很高。这又是怎么回事?在医学领域中,也经常看到偏振成像的影子,癌细胞的偏振特性与普通细胞不一样,Mueller矩阵的引入能辨识癌细胞。但,这些还处在研究阶段。
利用偏振对抗玻璃反光偏振目标探测同样有问题,它通过求解场景中目标物自身的偏振度和偏振角等偏振特性的真值来判断物体本身的材质和属性等。物理上确实是那么回事,但是真正做实验的时候,恐怕场景复杂时识别率也不会很高。这又是怎么回事?在医学领域中,也经常看到偏振成像的影子,癌细胞的偏振特性与普通细胞不一样,Mueller矩阵的引入能辨识癌细胞。但,这些还处在研究阶段。
 偏振探测
偏振探测
以上这些都是利用偏振特性差异性做的几类工作,从物理原理上来看,都没有问题,但应用时却发现似是而非。我们来深度分析其中的原因。前面已经提到偏振特性不够显著是造成偏振成像的主要原因之一,况且偏振只能间接探测。问题就出在这里,进行偏振测量时离不开偏振器件,这些偏振器件要么加在镜头上,要么镀在探测器像元上,最终造成的结果都是能量损失,大多时候偏振探测的能量利用效率只有20-30%,甚至更低。这必然造成信噪比严重下降,使得本来就特征不太明显的偏振信息沉入了噪声的汪洋之中。
再进一步分析,上面所说的偏振成像应用其实还是处在原来维度处理问题,并没有借助于偏振度和偏振角之类的信息提升维度。我们能不能认为这实际上是在低维度徘徊呢?回答这个问题之前,再看一个偏振与人工智能结合的例子。做出全球第一款商用偏振图像传感器的Sony公司研发人员M.Kato说:“我也认同偏振图像传感器和人工智能是非常好的搭配,因为这样能够获取更多的光信息,原理上可以提升识别精度。我们曾利用多种传感器+深度学习技术比较人、车辆、透明瓶等物体的识别率,发现在测试环境中,无论什么情况下,都是偏振图像传感器的识别率更高。”
这是不是在告诉我们:偏振这个实际上比单独的强度探测高一个维度的物理量,如果还是把它按照低维度使用,效果不会好到哪里去?就像“自杀螺旋”:当把一只蚂蚁放在一张白纸上,用圆珠笔在蚂蚁周围圈出一个圈包围它,此时,你会惊奇地发现,每当蚂蚁接近圆圈时,它会迅速的回避用笔圈出来的线,之后,便会呈现无脑在圈内打转的情况,如果蚂蚁一直找不到圆圈的出口,就会一直在圆圈中无限循环,直到累死。如果偏振成像不走出这个“自杀螺旋”,一直停留在低维空间,就很难有出路。  “自杀螺旋”
“自杀螺旋”
幸好,科学家们实现了偏振成像高维度应用——偏振三维成像。它的原理其实很简单,通过偏振度和偏振角的信息解译出物体的三维形貌。看到没?偏振度和偏振角都属于高维度信息,利用这个高维度信息经过变换推演至空间的另一个维度,变成了相对深度信息,这其实是保持了偏振成像的高维度特性。需要注意的是:由偏振三维成像解译出来的“深度”是相对值,只有提供了物体的距离信息,才能计算出实际的物理深度。最有意思的是,偏振三维成像的精度竟然能达到10-5这个量级,这是一般只能在3-5 m范围内发挥作用、只有厘米级精度的光场相机遥不可及的。我在第一篇文章里说过:几何光学成像“一般能达到的精度为10-2至10-3数量级,难以实现10-5到10-6这样数量级精度的跨越”。光场相机超过5 m之后几乎不能谈精度问题,而用偏振相机做100 m距离拍摄人脸,重建精度可达2 mm。甚至,我们用单个偏振相机拍摄36000 km外的月亮,竟然也能重建出环形山的三维形貌,这是其他光学成像方法无法做到的事情!
 人脸偏振三维成像[Han P, Optics and Lasers in Engineering, 2022, 151:106925]
人脸偏振三维成像[Han P, Optics and Lasers in Engineering, 2022, 151:106925]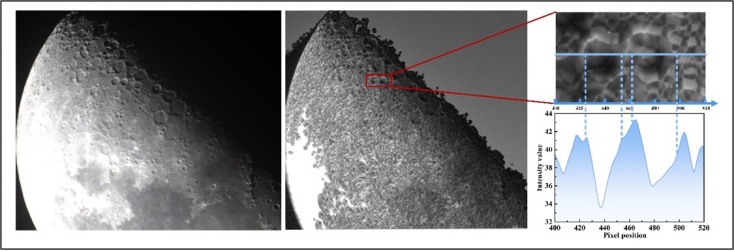 远距离高精度偏振三维成像
远距离高精度偏振三维成像
这件事再次证明:即使你已经跨出了升往高维度空间的那一步,但你的思维如果还停留在“自杀螺旋”的低维度层次,依然无法欣赏到高维度空间的巅峰之美。
3、偏振探测器——偏振成像走向广阔市场的钥匙
偏振成像的方法主要可以分为:分时的旋转偏振片法、多孔径偏振成像和直接利用偏振探测器成像。
旋转偏振片的方法出现的最早,因为摄影中经常会采用偏振片抑制水面的反射光、压低天空背景,会使相片色彩和层次感更强,所以,在相机镜头前加上偏振片,分别按照0°、45°、90°和135°角进行拍摄四次,就可以获得所需要的偏振信息。很显然,这种方法非常简单,成本低,易操作。但这种方法实际上采用的是以时间换空间的方法,时间分辨率差,只适用于静态场景拍摄。  分时的旋转偏振片法
分时的旋转偏振片法 偏振摄影多孔径偏振成像是利用4个相机共视场,每个相机镜头上固定放置0°、45°、90°和135°偏振片,是一种空间换空间的方法。这种方法成本偏高,对4个相机的共孔径机械安装要求比较高,同时对4个相机的拍摄同步触发也有很高的要求。优点是不仅适用于静态场景,而且可以搭载在动态平台上。我们研制的偏振三维成像的卫星载荷就采用了这种方式。
偏振摄影多孔径偏振成像是利用4个相机共视场,每个相机镜头上固定放置0°、45°、90°和135°偏振片,是一种空间换空间的方法。这种方法成本偏高,对4个相机的共孔径机械安装要求比较高,同时对4个相机的拍摄同步触发也有很高的要求。优点是不仅适用于静态场景,而且可以搭载在动态平台上。我们研制的偏振三维成像的卫星载荷就采用了这种方式。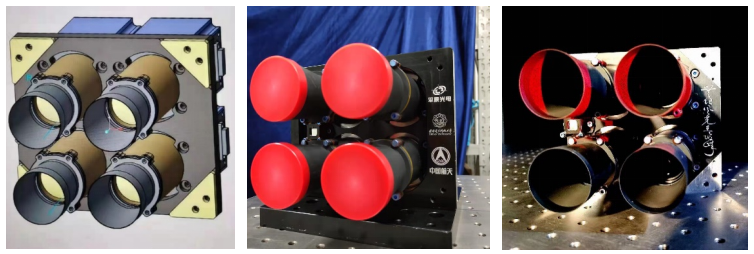 偏振三维卫星载荷利用专用的偏振探测器做偏振成像是研究人员梦寐以求的,因为专业偏振探测器可以跟普通的CCD、CMOS一样使用,只需要加一个光学镜头就可以直接工作了。这实际上也是一种空间换空间的方法,因为图像传感器中每4个像素合并为一组,每个像素分别镀了0°、45°、90°和135°的偏振膜,牺牲了空间分辨率。显然,这种方法是最佳的一种应用模式,而关键问题是偏振探测器。前几年,国内外出现了很多这方面的研究,直到2017年下半年,Sony出品了全球第一款商用级别的偏振图像传感器,拉开了偏振成像进入应用的序幕。
偏振三维卫星载荷利用专用的偏振探测器做偏振成像是研究人员梦寐以求的,因为专业偏振探测器可以跟普通的CCD、CMOS一样使用,只需要加一个光学镜头就可以直接工作了。这实际上也是一种空间换空间的方法,因为图像传感器中每4个像素合并为一组,每个像素分别镀了0°、45°、90°和135°的偏振膜,牺牲了空间分辨率。显然,这种方法是最佳的一种应用模式,而关键问题是偏振探测器。前几年,国内外出现了很多这方面的研究,直到2017年下半年,Sony出品了全球第一款商用级别的偏振图像传感器,拉开了偏振成像进入应用的序幕。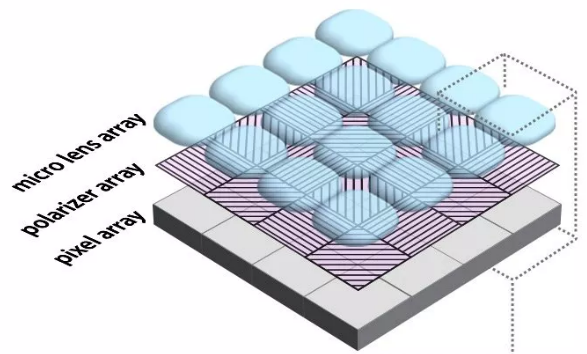
 Sony分焦平面偏振探测器
Sony分焦平面偏振探测器 分焦平面偏振探测故事讲到这里是不是已经很让人振奋了?理想是丰满的,但现实比较“骨感”,主要有两个原因:
分焦平面偏振探测故事讲到这里是不是已经很让人振奋了?理想是丰满的,但现实比较“骨感”,主要有两个原因:
(1)偏振探测器太贵了,目前只有一种探测器,没得选择,并且,没有国产的偏振探测器;
(2)偏振成像的应用认可度低,甚至连Sony自己都不知道到底具体可以用到哪些地方。没有廉价的偏振探测器,很难大范围推广偏振应用;同样,偏振成像如果不能很好地解决实际应用问题,用户不认可,推广也很艰难。那么,偏振探测器是不是真的很难?难,其实也不难。偏振探测器首先是有足够高的消光比,才能够有足够的能量进入到探测单元,保证信噪比。
同时,还需要克服透光率与消光比的相互制约。从工艺稳定性和可靠性的角度出发,采用氧化膜填充偏振片的超薄金属板间隙,但该方法造成消光比和透光率相互制约。理论上,只要使偏振片的宽度和间隙远远小于光的波长(即更细的光栅和更窄的间隙),就能提高性能,但是金属加工技术无法满足。如果利用氧化膜填充,光经过氧化膜后,波长变短,需要进一步缩小偏振片的宽度和间隙。
Sony公司将偏振片的间隙变成空气层的气隙结构,解决了相互制约的问题,但加工精度、气隙结构的稳定性和可靠性还存在挑战。这是我们能够看到的关于偏振探测器的报道。
这些都是从技术层面讲的,但真正难的不是技术,是市场。只有应用前景好,厂商才愿意去投资生产偏振探测器,这恰恰又回到了技术,那就是偏振成像技术需要能够真正解决问题。
4、偏振成像的未来是什么?
人类是生活在低维度世界里的生物,只有极少数人能理解高维度空间。正是因为人类缺少对高维度空间的认知和理解,而光电成像实际上是高维度数据的维度坍塌,变成了人类“熟悉”的二维模式——图像,造成了即使我们获得了高维度的数据,却在低维度空间里看它的各种映射,就像瞎子摸象。
这个问题拓展到人工智能的领域,亦是如此。目前,深度学习的样本空间多为图像,即使是三维点云,也将深度信息映射为二维图像的灰度,这种维度坍塌造成的结果是与人类认知世界的实际模式相异,所以,目前的人工智能只能处理二维数据,三维点云输入到模型中后,变成了一个二维空间的映射,当然识别率会下降,原因就是维度没有充分利用。 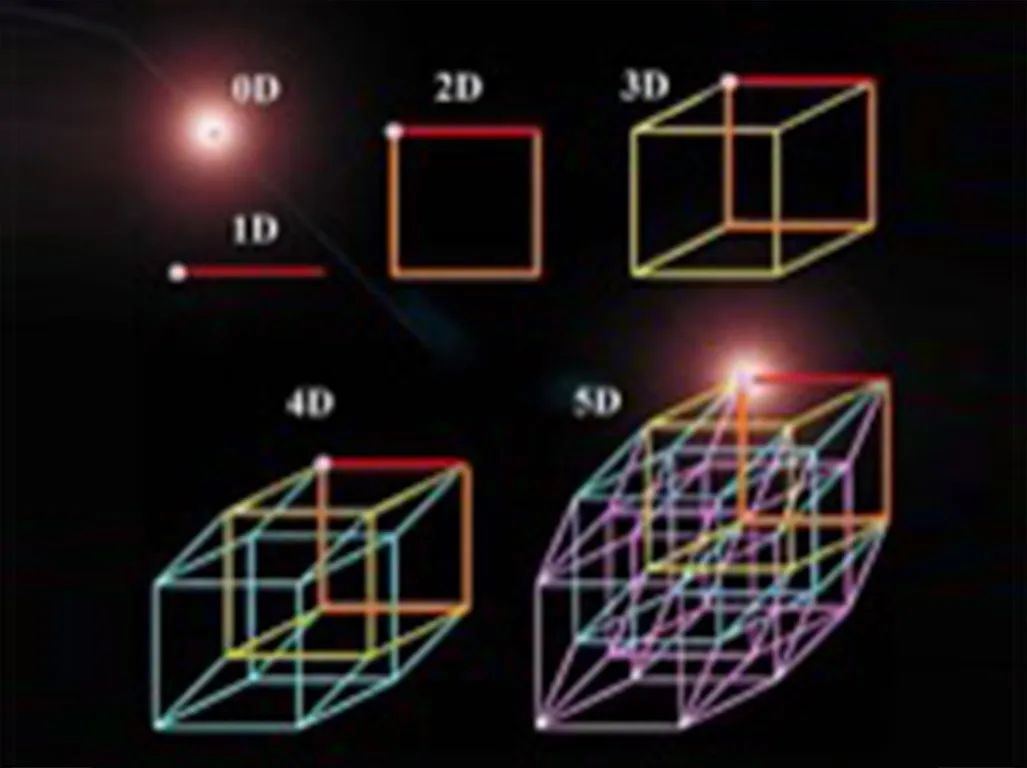 高维空间
高维空间 “瞎子摸象”
“瞎子摸象”
计算光学成像是升维的过程,偏振成像也是如此,是在光场中引入了偏振这个维度。但我认为任何见到偏振成像的人都是在通过若干二维的映射空间来试图理解偏振,这实际上是人类自身的不足,难以解决。人类有眼睛可以看世界,有耳朵可以听声音,有鼻子可以嗅气味,还有耳蜗能感知惯性,平衡身体,但人类没有蜜蜂、蜘蛛和章鱼等感知偏振的本领,也不能像蛇一样感知红外,更不能像雄鹰一样在万米高空看到地面上的老鼠。我们不能感知偏振这类高级玩意儿,以至于我们一谈起偏振,就有点蒙圈。
人类一旦陷入低维度世界,就变得像蚂蚁看人类,也容易陷入“自杀螺旋”。偏振成像这个升维的过程从理论上来讲,在低维度空间里得不到的东西,其实可以借助偏振的信息“看”得到。可是,我们在处理很多问题的时候习惯把高维的东西投影到低维,变成熟悉的东西,比如图像。处理偏振图像也是如此思维,将偏振信息向不同低维度投影,降维成一般图像使用,硬是把一个“白天鹅”变成了“丑小鸭”。
对于偏振来讲,一定要把偏振度和偏振角这两个信息用好。前面讲的偏振应用,去雾、去反射光和偏振目标探测基本上只用了偏振度这个信息,偏振角几乎没有用到;只有在偏振三维成像中这两个量都用到了,并且没有降维。从另外一个角度看,去雾、去反射光和偏振目标探测等应用必须要发挥偏振角这个量的作用,达到升维的目的,才能更好地解决问题。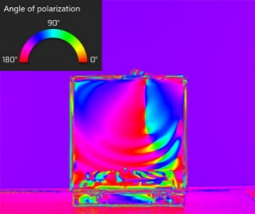 利用偏振角进行应力检测这里,我要再次强调一下偏振对物理光场的作用。在散射成像中,宽光谱是非常难以克服的问题,但我们引入了偏振信息之后发现:这道在强度探测维度难以跨越的鸿沟竟然变成了坦途,再次验证了高维度物理光场的优势。我相信偏振成像一定拥有美好的未来。在多种规格偏振探测器量产、探测灵敏度和信噪比等问题解决后,偏振成像一定会在工业检测、机器视觉、监控、手机摄影、3D摄影和三维目标识别等领域大放异彩。让我们一起迎接偏振成像的美好明天吧!
利用偏振角进行应力检测这里,我要再次强调一下偏振对物理光场的作用。在散射成像中,宽光谱是非常难以克服的问题,但我们引入了偏振信息之后发现:这道在强度探测维度难以跨越的鸿沟竟然变成了坦途,再次验证了高维度物理光场的优势。我相信偏振成像一定拥有美好的未来。在多种规格偏振探测器量产、探测灵敏度和信噪比等问题解决后,偏振成像一定会在工业检测、机器视觉、监控、手机摄影、3D摄影和三维目标识别等领域大放异彩。让我们一起迎接偏振成像的美好明天吧!  卫星遥感
卫星遥感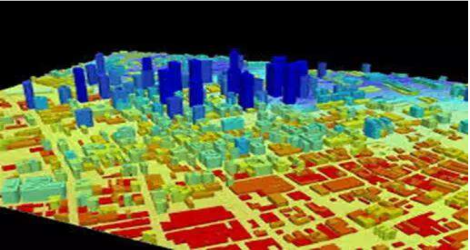 三维遥感技术对地观测
三维遥感技术对地观测 M87星系中黑洞的偏振观测图像与拟合图像,线标志着偏振方向
M87星系中黑洞的偏振观测图像与拟合图像,线标志着偏振方向
作者团队介绍
邵晓鹏,教授,博士生导师,西安电子科技大学光电工程学院院长。西安市计算成像重点实验室主任,西安电子科技大学杭州研究院先进光电成像与器件实验室主任,西安电子科技大学光学工程学科带头人。陕西省创新人才推进计划中青年科技创新领军人才,陕西省新体制光电成像与感知科技创新团队带头人,中国光学工程学会常务理事,中国光学学会理事,陕西省光学学会副理事长,西安市激光红外学会副理事长,中国宇航学会光电委员会常务委员,中国兵器光电子专业委员会委员,华为媒体技术实验室技术咨询委员会委员,美国光学学会(OPTICA)会员,国际光学工程学会(SPIE)会员。国防工业光电信息控制和安全技术重点实验室学术委员会委员、中科院航空光学成像与测量重点实验室学术委员会委员、中科院光谱成像技术重点实验室学术委员会委员、中科院空间精密测量技术重点实验室学术委员会委员、中国红外探测器技术航空科技重点实验室学术委员会委员、陕西省先进光学技术国际联合研究中心学术委员会委员、陕西省光信息技术重点实验室学术委员会委员;Ultrafast Science副主编,《激光与光电子学进展》《光学 精密工程》《光子学报》《应用光学》《光电技术应用》《数据采集》《西安电子科技大学学报》《西安邮电大学学报》等期刊编委。作为国内最早开展计算成像研究的人员之一,在新体制光电成像与感知领域攻坚前沿基础研究并促进技术工程应用,率先在国内开展散射成像研究。发表论文100余篇、发明专利80余项,获省部级奖励5项,主持国家自然科学基金、JKW前沿创新、863专项、GF预研基金、GF重点实验室基金等项目60余项,年经费保持在1000万元以上,获JD科技进步奖、GF科学技术进步奖、航天科技进步奖、信息产业部科学技术进步奖等多项重要奖项,入选全球前2%顶尖科学家榜单。倡导举办4届全国“计算成像技术与应用”专题研讨会,提高了计算成像在光学领域的影响力。带领团队成员研制了广域相机、高性能低成本小型化红外导引头、偏振相机、激光陀螺仪光损耗测试仪、辐射计量辐射光源稳定功率系统等,成果和样机用于国内多家科研院所,促进了新体制成像技术的装备应用。
刘飞,教授,博士生导师,西安电子科技大学计算成像研究所主任。西安电子科技大学华山菁英人才计划入选者。现任西安电子科技大学先进光学成像交叉前沿研究中心副主任,西安市计算成像重点实验室副主任,陕西省先进光电成像专委会常务副主任,美国光学学会(OPTICA)西电分会指导教师,中国科学院长春光机所应用光学国家重点实验室客座研究人员,光电信息控制与安全技术GF重点实验室客座教授, Journal of Nanophotonics期刊副主编,Cells期刊Computational imaging for Biophotonics and Biomedicine主题Guest Editor,OPTICA Travel Lecture(全球巡讲讲师);中国感光学会青年理事,《激光与光电子学进展》、《光子学报》等期刊青年编委,Optics Letters, Optics Express,Applied Optics,JOSA A等多个国际期刊审稿人。自2012年开始进行计算偏振成像技术的研究,累计主持国家自然科学基金青年、面上等项目,国家博士后科学基金面上项目,陕西省自然科学基金等科研项目二十余项,年均到款经费超过300万元,并在Optics Letters, Optics Express,等国际知名期刊发表学术论文40余篇,累计引用超过700余次,申请国家发明专利20余项,产学研转化2项。受邀参加首届JKW“四季青”青年论坛、CVPR等国内外学术交流会议进行成果汇报,并连续获得最受欢迎报告奖、最佳论文奖西安市自然科学论文一等奖等多项荣誉。
韩平丽,西安电子科技大学,讲师,硕士生导师。主要从事偏振成像技术研究,近年来主持包括国家自然科学基金青年项目在内的多项项目,主持项目经费超200万。在Optics Letters, Optics Express等国内外重要学术期刊发表SCI论文30余篇。申请国家发明专利10余项,完成产学研转化一项。发表教改论文2篇,主持包括教育部产学协同育人项目在内的多项教改项目。获陕西省科技工作者创新创业大赛二等奖(第一完成人)、西安市自然科学论文一等奖(第二完成人)等多项荣誉。
李轩,西安电子科技大学博士后,Optica Member。主要从事偏振三维成像、高精度偏振信息解译,以及超分辨率成像方面的关键技术和基础理论研究。近年来主要参与了国家自然科学基金面上项目、科技委创新基金、国家自然科学基金青年科学基金等多项国家自然科学基金项目及省部级基金项目研究。在Optics Letters,Optics Express等国内外学术期刊和会议上发表论文10余篇,申请国家发明专利7项,并多次在国际及国内学术会议上做口头报告。担任Optics Express,Applied Optics等期刊审稿人。
卫毅,博士研究生,就读于西安电子科技大学光电工程学院。主要从事高精度水下偏振成像,水下三维成像等方面研究工作。在国内外学术期刊上合作发表SCI论文7篇,EI论文8篇,合作申请发明专利5项。2021年获全国光学与光学工程博士生学术联赛三等奖和 “计算光学成像”创新挑战赛二等奖;2020年获西安市自然科学优秀学术论文奖;分别与2020年和2018年获第四届与第三届全国偏振与椭偏测量研讨会最佳学生报告奖;2018年获研究生国家奖学金。参与国家自然科学基金面上项目、科技委创新基金、国家自然科学基金青年科学基金等科研项目4项。
杨奎,博士研究生,就读于西安电子科技大学光电工程学院。主要研究方向为偏振成像、深度学习、水下清晰化增强与重建。在Optics Letters、Applied Optics、Acta Physica Sinca、IONS、FIO等期刊和会议发表论文数篇,发明专利两项。在硕博期间,主要完成和参与国家自然科学基金青年基金、陕西省博士后基金、陕西省自然科学基金等多项国家和省部级项目。
蔡玉栋,博士研究生,就读于西安电子科技大学光电工程学院。主要从事于偏振三维成像技术研究。已发表SCI论文一篇(第一作者);已参会并投稿国内会议 3 项(第一作者);申请发明专利 3 项;参与完成偏振3D人脸成像创新技术合作项目,长春光机所应用光学国家重点实验室基金等项目。曾有 2 次国家级, 1次省部级机器人大赛参赛经历,并获有国家一等奖。
孙少杰,光学工程硕士研究生,就读于西安电子科技大学光电工程学院。主要从事水下偏振成像技术研究。在Acta Physica Sinica、激光与光电子学进展等期刊发表论文两篇,申请国家发明专利一项。硕士期间,主要参与了国家自然科学基金面上项目、国家自然科学基金青年基金、陕西省自然科学基金等多项国家级、省部级项目,2019-2021连续两年获得西安电子科技大学优秀研究生荣誉称号,2021年获研究生国家奖学金,2022年获2022届陕西省研究生优秀毕业生荣誉称号。
参考论文
[1] Han P, Cai Y, Liu F, et al. Computational polarization 3D: New solution for monocular shape recovery in natural conditions[J]. Optics and Lasers in Engineering, 2022, 151: 106925.[2] Liu F, Zhang S, Han P, et al. Depolarization index from Mueller matrix descatters imaging in turbid water[J]. Chinese Optics Letters, 2022, 20(2): 022601.[3] Li X, Liu F, Han P, et al. Near-infrared monocular 3D computational polarization imaging of surfaces exhibiting nonuniform reflectance[J]. Optics Express, 2021, 29(10): 15616-15630.[4] Yi Wei, Pingli Han, Fei Liu, Jinpeng Liu, Xiaopeng Shao. Polarization descattering imaging: a solution for nonuniform polarization characteristics of a target surface[J]. Chinese Optics Letters, 2021, 19(11): 111101.[5] Fei L, Shao-Jie S, Ping-Li H, et al. Clear underwater vision in non-uniform scattering field by low-rank-and-sparse-decomposition-based polarization imaging[J]. ACTA PHYSICA SINICA, 2021, 70(16).[6] Wei Y, Han P, Liu F, et al. Enhancement of underwater vision by fully exploiting the polarization information from the Stokes vector[J]. Optics Express, 2021, 29(14): 22275-22287.[7] Xuan L, Fei L Xiao-Peng S. Research progress on polarization 3D imaging technology[J]. Journal of Infrared and Millimeter Waves, 2021, 40(2): 248.[8] Liu F, Li X, Han P, et al. Advanced Visualization Polarimetric Imaging: Removal of Water Spray Effect Utilizing Circular Polarization[J]. Applied Sciences, 2021, 11(7): 2996.[9] Yu-Dong C, Ping-Li H, Fei L, et al. Polarization-based extracting diffuse reflection from light-field of object surface[J]. ACTA PHYSICA SINICA, 2020, 69(23).[10] Han P, Liu F, Wei Y, et al. Optical correlation assists to enhance underwater polarization imaging performance [J]. Optics and Lasers in Engineering, 2020, 134: 106256.[11] Liu F, Wei Y, Han P, et al. Polarization-based exploration for clear underwater vision in natural illumination[J]. Optics express, 2019, 27(3): 3629-3641.[12] Liu F, Han P, Wei Y, et al. Deeply seeing through highly turbid water by active polarization imaging[J]. Optics letters, 2018, 43(20): 4903-4906.[13] Wei Y, Liu F, Yang K, et al. Passive underwater polarization imaging detection method in neritic area[J]. ACTA PHYSICA SINICA, 2018, 67(18): 184202.[14] Han P L, Liu F, Zhang G, et al. Multi-scale analysis method of underwater polarization imaging [J]. ACTA PHYSICA SINICA, 2018, 67(5): 054202.
本文经授权转载自微信公众号“中国激光杂志社”,编辑:张新蕾。

0
推荐
 京公网安备 11010502034662号
京公网安备 11010502034662号 {kind=link}