如火如荼的自动驾驶技术发展到今天,无人驾驶的车辆已经走上了街头。但是,为了保证行车安全,绝大多数无人驾驶车辆都配备了副驾座位上的“安全员”,监控车辆的行车状态。坊间有戏言:每一辆无人驾驶汽车底盘都藏着一个驾驶员。驾驶等级从L3到L4、到L5的迁跃,似乎面临着一道难以逾越的天堑。
想要与人类司机并驾齐驱,像真正的人一样灵活应变、自主决策,自动驾驶还有一个Plan B可以选择,那就是通用人工智能。
撰文 | 刘凯(渤海大学教育科学学院)、贾敏(渤海大学通用人工智能研究所)
人工智能具有专用和通用两种不同取向,分别对应专用人工智能与通用人工智能。目前学术界与实业界中的“人工智能”一词几乎无例外地均属专用人工智能,其目的在于通过预设的算法或训练解决特定问题;通用人工智能则致力于研发元学习能力,借助后天培育实现特定问题的成功解决。
正如将“智能”视作“计算”一样,自动驾驶在专用人工智能专家眼中似乎只是一个纯粹的技术问题,并试图通过模块化的方式实现技术拓展。人可以做到不携带任何设备就自行出门,但自动驾驶汽车离开通讯网络将寸步难行。纵使最新的高性能芯片和激光雷达傍身,自动驾驶汽车在稍微拥堵的路口驶出高速或插入转弯队列时依然经常判断失误。为解决此类问题,汽车制造商争先恐后地提升汽车的智能水平,从L2-L3向L4-L5急行军的消息经常见诸报端。与此同时,专门为协助自动驾驶车辆应对复杂路况的各式专用计算设备也应运而生,C-V2X蜂窝车联网技术就是其中之一,具备交叉路口来车提醒、前方事故预警、盲区监测、道路突发危险情况提醒等功能,被视为智能驾驶和智慧交通落地的关键环节。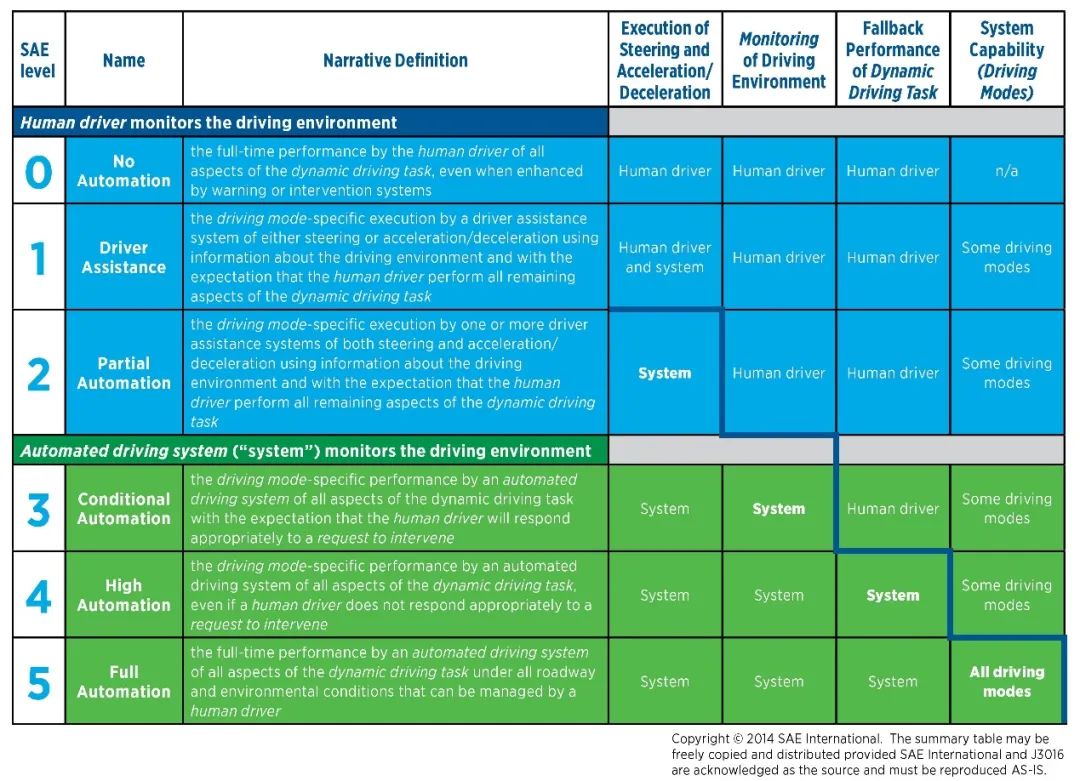 国际自动机工程师学会(SAE)对自动驾驶等级的分级
国际自动机工程师学会(SAE)对自动驾驶等级的分级 来源:
来源:
可以预见,自动驾驶车辆通过路口的成本将继续上升,连稍有经验的城市流浪狗都能做到的事情,如今却要在所有路口都部署各式监控设备,使得本就复杂的城市道路管理雪上加霜。这仅限于市内,毕竟靠外界帮助才能获取的“绝对安全”难以在郊外推广。看起来更像是为了更加“智能”而精心设计的一出城市“秀”。
未来,专用人工智能技术路线下的L4-L5级自动驾驶,必然趋向“智能外包”的技术解决路线——依靠的不是更强的单车智能,而是更复杂、更精密的上层协调节点。这种做法存在诸多隐患,高级协调节点不仅具有十分有限的覆盖性,并将迅速增加通行系统的边际成本和总体复杂性,令单车决策链延长及决策参与度降低。其后果则是,智能路网本身的系统性脆弱将面临随时被放大的危险,这就是专用人工智能集权技术发展路线与生俱来的软肋!
事实上,专用人工智能的自动驾驶从未真正面对“智能”问题,而是将单车智能(内部解)不断转嫁为寻求外部援助(外部解),即车辆自己更多负责提出问题而非解决问题。到最后,并不是汽车变得更具适应性,而是人为地改造了那些不适应的地方——汽车本身仍被封印在“有多少人工,就有多少智能”的魔咒之中。
通用人工智能则不同。它试图创造能思考、有情感的具有认知功能的软件系统,并认为智能并非全知全能,系统需要通过预设的元能力不断学习才能到某个领域内的实用水平。而且,即使在达到这种水平之后,学习也不会停止,尤其是在环境变化的情况下更是如此。对通用人工智能而言,先天预置的是元水平的学习能力,但一切学习的内容都由后天习得。因此,通用人工智能系统的自动驾驶本质上是一个教育而非技术问题。
正如刚出生的人类婴儿不会驾驶汽车一样,通用人工智能系统启动时也并未预置任何驾驶经验,更不是为了驾驶汽车而设计。其实,自动驾驶对通用人工智能来说是一个伪问题。因为,与人类高度类似,通用人工智能系统成长的第一步也是通过自身的感知运动设备获取具身的直接物理经验。训练一个机器人和训练一辆汽车完成自动驾驶任务,对通用人工智能系统并无实质区别。究竟装配步足、履带还是轮子等“器官”,只是系统的“感觉”各异,却并非“驾驶”有别。甚至,都未必非得装配“腿脚”,用翅膀或推进器前进也同样可以。乘客可以继续坐在车里,也可以把汽车造成机器人形状而把乘客收容到“肚子里”,甚至还能怀抱或者背驮。但凡能够实现载人有目的性的自主移动,就是自动驾驶。因此,通用人工智能的自动驾驶不挑设备类型、不挑载运形式、不挑驾驶环境,通用人工智能的自动驾驶正是通用意义上的驾驶。
这种通用性一方面体现在外设选择的多样性,另一方面则体现在驾驶背后学习内容的广博性和具身理解性。通用人工智能自动驾驶“算法”的全部奥义,就是从零开始“养育”一台通用人工智能的“机器婴儿”。这台“机器婴儿”具有主动性,其所有行动力全都依靠自身积累的历史经验,是一种向内依赖的平权技术模式,而非向外依赖的集权技术模式。于是,通用人工智能系统的“养育”过程,并不存在专用人工智能那种外在上帝视角的干涉,唯一的上帝视角恰是机器“婴儿”自身的内在视角。而“养育”具体的技术手段,也不是专用人工智能的机器学习、图象识别、优化求解等计算机及机器人相关的软硬件技术,而是相较于人类婴幼儿一样的教育手段。这种特殊性与人们过去几十年来对机器学习、人工智能的了解相悖,令其乍看上去似乎难以理解。在此,以感知运动为例进行比较说明:
首先,专用人工智能系统的处理内容无所不包,既可以是图像、声音之类的具象数据,也可以是自然语言、知识之类的抽象概念,但通用人工智能系统的教育能且只能从感知运动经验做起。因为只有直接经验才是绝对经验,而只有绝对经验才能在通用人工智能系统中直接落地。至于给通用人工智能系统预置“思想钢印”的想法皆为秕言谬说,这些抽象经验根本没有立身之基,好比向人类婴儿询问“好人有好报”的看法一样可笑。尽管理论上也许可以借助某种神秘生物手段在婴儿脑中搭建特定的神经构成,但实际上婴儿对这种抽象观念却毫无一丝理解可言。所以,就连距离、速度、避障乃至数字等自动驾驶最初级的常识,通用人工智能的机器婴儿一开始也并不知晓,亦如人类婴儿一般。
其次,专用人工智能系统的学习和训练阶段中,感知与运动通常是分离的。图像识别无须摄像头像人眼一样“跳视”,而机器人位移也只是程序设定的机械操作及其优化。然而,在通用人工智能系统“养育”过程中,感知和运动不可分,二者不是两类不同事物,而是同一类事物的不同侧面。
运动是感知经验变化的原因,感知则是运动结果的反馈,二者相互依存、缺一不可。更为重要的是,直接或间接经由运动,感知才能建构出主体内在的经验意义。比如,对于一个仅装配轮子和超声波传感器的通用人工智能小车而言,声波数据本身是没有意义的,其意义发生于运动因其变化之后;而单纯的运动也没有意义,运动的意义在于传感器数值由其减少到零的过程之中。也就是说,感知运动信号是最直接且不可再分的原子经验,原子经验没有原生意义,其意义来自内在的相互赋予。以视觉为例,通用人工智能的主动视觉与主流计算机视觉的基本原理和实现方式大相径庭,尽管都是“看”,却有不同的“见”。前者关注动机水平上自上而下面向可供性(Affordance)的意义建构,具有主观性和可解释性;后者则聚焦于像素水平自下而上的模式发现与匹配,本质是一个无脑的哲学僵尸。
此外,通用人工智能的自动驾驶也不仅仅只停留在造车的层面,它是我们的一面镜子,能够从中折射出更为深刻的人的道理而令我们受益。例如,通用人工智能机器“婴儿”的运动分为主动运动和被动运动两类。主动运动由机器“婴儿”自行控制车轮移动,被动运动则是车轮不动由外力(比如人拿起小车)导致车体位置变化。主动运动是主观经验的发动机,是从客观环境中与传感器一同协作感受自我边界从而区分主客体的原动力,因此对机器“婴儿”至关重要。只有经历这样的成长,才能在人与物、自我与他人、自我与环境之间形成更清晰的辨识。反观人类自身,对那些无法有效将人与物、自我与他人进行区分的自闭症患儿而言,通用人工智能自动驾驶所带来的病理学启示,无疑是当前自闭症生物学假说深陷泥淖之时的一线“另类”曙光。
故而,不同于时下大燥的自动驾驶技术,通用人工智能注定走在不一样的道路上——不只驾驶车辆,甚至品悟“人生”。
注
文章发表于《中国社会科学报》科学与人文版[1],本文为投稿原文。
[1]刘凯,贾敏. 探索基于通用人工智能的自动驾驶[N]. 中国社会科学报,2022-08-23(007).

0
推荐
 京公网安备 11010502034662号
京公网安备 11010502034662号 {kind=link}